Robotika rozcestník
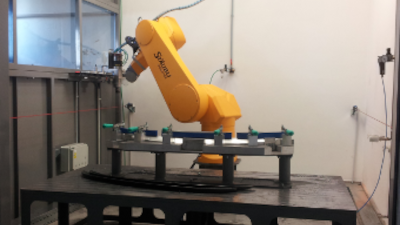





Vytvoříme Vám simulaci robotického pracoviště nebo výrobní linky přesně podle Vašeho zadání.
|
Nejrychlejší cesta od konceptu k realitě. Navrhování nových výrobních procesů pro každého.
|

|

|
Inteligentní kamerové systémy Datalogic.
|