Robotická pracoviště SoliCAD
Našim zákazníkům nabízíme dlouhodobou spolupráci v oblasti průmyslové automatizace a robotizace s cílem zvýšení efektivity výroby a bezpečnosti práce. Pro naše zákazníky připravujeme:
- návrh konceptu robotického pracoviště včetně simulace
- vypracování rozpočtu na realizaci robotického pracoviště
- optimalizace robotického pracoviště
- dodání pracoviště
- zaškolení obsluhy a podporu při rozběhu robotického pracoviště
- servis pracoviště a technickou podporu zákazníka
Máme zkušenosti zejména s následujícími typy robotických aplikací:
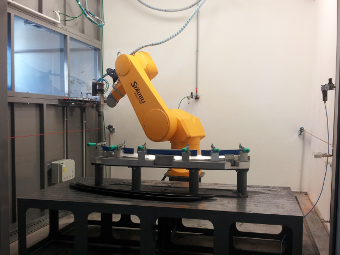
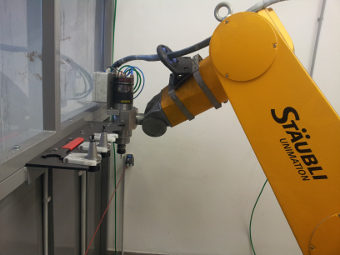
Integrujeme roboty Comau, Stäubli, lakovací roboty Epistolio, ABB a další.
SIMULACE PRACOVIŠTĚ
Návrh robotického pracoviště ve Visual Components s offline programováním zahrnuje několik kroků od vytvoření virtuálního prostředí po vytvoření a optimalizaci programů pro roboty. Následující je detailní postup:
1. Vytvoření Virtuálního Prostředí:
- Spouštění Visual Components:
- Otevření software Visual Components a vytvoření nového projektu.
- Přidání Pracoviště:
- Vytvoření pracoviště v 3D prostoru, přidání pracovních stanic, dopravníků a dalších zařízení podle potřeby.
2. Import Modelu Robota:
- Import 3D Modelu Robota:
- Import 3D modelu robota do virtuálního prostředí. Může se jednat o model reálného robota nebo generického robota.
3. Definice Nástrojů a Objektů:
- Vytvoření Nástrojů:
- Definice nástrojů, které robot používá. Může jít o frézy, svářečky, čištění atd.
- Vytvoření Objektů:
- Vytvoření objektů, které budou manipulovány robotem, např. díly nebo polotovary.
4. Definice Operací:
- Offline Programování:
- Nastavení offline programování, což znamená definování pohybů robota a operací, které bude vykonávat bez fyzické přítomnosti reálného robota.
5. Simulace Pohybů Robota:
- Vizualizace Simulace:
- Simulace pohybů robota ve virtuálním prostředí. Lze sledovat, jak robot interaguje s pracovním prostředím a manipuluje s objekty.
6. Optimalizace Tras a Kolizí:
- Kontrola Kolidujících Objektů:
- Kontrola a řešení případných kolizí mezi robotem a okolními objekty.
- Optimalizace Tras Pohybů:
- Optimalizace tras pohybů robota pro zkrácení cyklu a zvýšení efektivity práce.
7. Generování Programů:
- Generování Robotických Programů:
- Generování offline programů pro roboty založených na definovaných operacích.
8. Kontrola a Oprava Programů:
- Kontrola Syntaxe Programů:
- Kontrola syntaktických chyb v programech robotů.
- Oprava Chyb:
- Oprava případných chyb nebo nedostatků v programech.
9. Vytvoření Scénářů a Simulace:
- Vytvoření Scénářů:
- Vytvoření scénářů pro testování robotických operací v různých situacích.
- Simulace Scénářů:
- Simulace scénářů pro ověření správnosti a efektivity programů.
10. Vytvoření Dokumentace:
- Dokumentace Procesu:
- Vytvoření dokumentace, která obsahuje informace o provedených simulacích, pohybech robota a výsledcích optimalizací.
11. Export Programů pro Reálný Robot:
- Export Programů do Formátu Podporovaného Reálným Robotem:
- Export vygenerovaných offline programů do formátu, který podporuje reálný robot pro nahrání a provedení.
12. Testování na Reálném Robotovi (Volitelné):
- Testování na Reálném Robotovi:
- Pokud je možné, testování vytvořených programů na reálném robotovi pro ověření jejich funkčnosti v reálných podmínkách.
Celkově vzato, postup návrhu robotického pracoviště ve Visual Components s offline programováním zahrnuje vytvoření virtuálního prostředí, definici nástrojů a operací, simulaci, optimalizaci, generování programů a nakonec testování na reálném robotovi nebo v reálném prostředí.
Robotické obrábění
Robotické obrábění
je efektivní řešení pro obrábění měkčích materiálů, např. hliník, plasty, karbon, dřevo a podobně. Stavíme kompletní buňky na míru pro zákazníka, včetně obráběcích přípravků a CAD/CAM softwaru SprutCAM a T-Flex pro generování drah.
 |
 |