Visual Components - robotická simulace
![]()
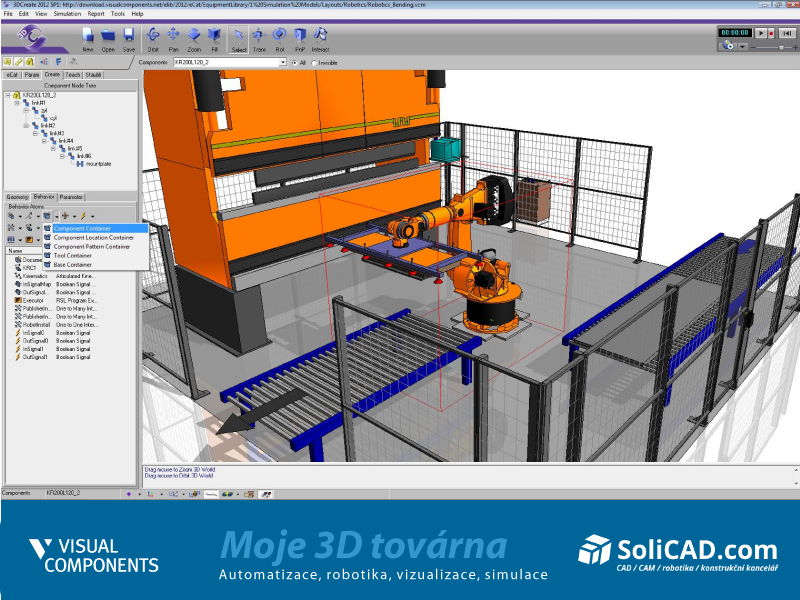
Pomocí programu Visual Components je možné vytvořit úplnou simulaci automatizované výroby a všech kooperujících procesů.
Není potřeba jiných softwarů k simulaci robotických pracovišť a příslušenství Vaší výroby.
Visual Components umožňuje vytvořit všechny uvažované výrobní vazby a simulovat plánovanou výrobu nebo optimalizovat stávající výrobní linku.
Využitím Visual Components můžeme dosáhnout následujících robotických funkcí:
- používání rozsáhlé a stále se rozšiřující knihovny modelů zařízení dovoluje postavit Vaše robotické pracoviště během několika minut,
- umožňuje vytvoření programů pro roboty "OFF-LINE programování", které mohou být testovány bez potencionálního poškození robota,
- kontrola manipulačního dosahu a vyběr vhodného robota a nástroje,
- simulace spolupráce robotů,
- kontrola kolizí a nebezpečných stavů,
- simulace dalších zařízení jako jsou dopravníky, uchopovače a servozásobníky,
- vizualizuje pohyby robotů a zasílá Vaše dispoziční návrhy zákazníkům a kolegům,
- simulace externí TCP.
Program Visual Components zahrnuje elektronickou knihovnu komponent, které jsou přístupné prostřednictvím internetu.
Knihovna obsahuje řadu modelů robotů a neustále roste. Současná knihovna obsahuje roboty těchto výrobců: ABB, Adept, Codian, Comau, Denso, Dobot, Epson, ESTUN, EverRobot, Exechon, Fanuc, Gudel, HIWIN, Kawasaki, KUKA, LESTA, Mitsubishi, Nachi, Omron, OTC Daihen, Panasonic, Precise Automation, Reis, Schneider Electric, Schunk, Siasun, Stäubli, TATA, Techman Robot, Toshiba, Universal Robots, Yamaha, Yaskawa.
Pokud model robota, který požadujete není v knihovně, pak můžete použít volně stažitelný doplněk průvodce pro tvorbu robota a vytvořit model robota. Tento doplněk dovoluje uživateli vkládat parametry robota jako jsou délka článku, min/max úhly kloubů, atd. Průvodce pak vygeneruje robota o správné velikosti a rozměrech, zahrne i kinematiku a jiné chování požadované k vytvoření plně funkčního modelu robota pro Visual Components.
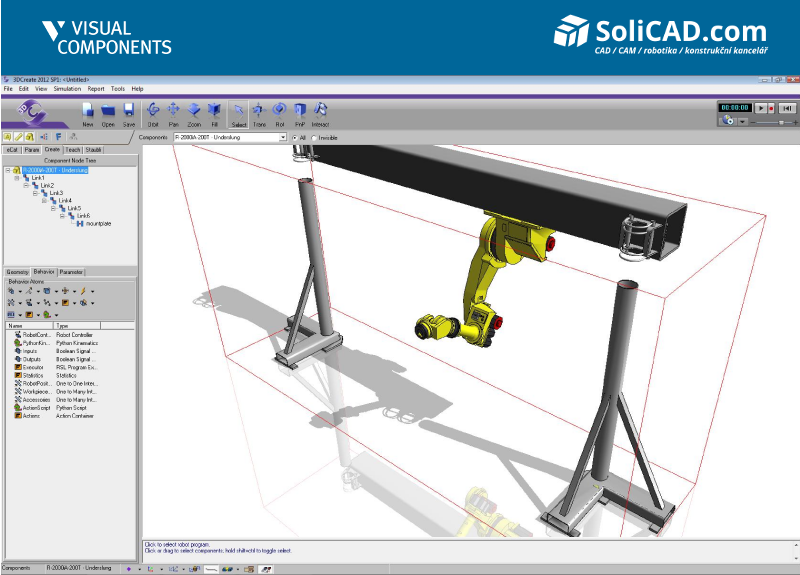
Rychlá kontrola kolizí a algoritmů při plánování dispozic a optimalizace procesů. Průchodové cesty mohou být drženy na místě, zatímco vybavení je přemísťováno a krokováno skrz proces ke kontrole kolizí a nebezpečných stavů. Všechny pozice robotů jsou reprezentovány pomocí snímků pozic robota ve 3D světě, který je barevně rozlišený pro snadné znázornění manipulačního dosahu.
Programování robotů je děláno pomocí RSL (Robot Sequence Language – robotický sekvenční jazyk). RSL, inspirovaný normami RRSII, je snadno použitelný jazyk pro programování robotů. RSL může být přímo připojené do rozvaděče robota, virtuálního rozvaděče nebo softPLC pomocí rozhraní COM a RRS2. Použitím nativního robotického programovacího jazyka a virtuálního robotického rozvaděče může být proces, digitální vstupy/výstupy a časy programových cyklů, kontrolován s vyšším stupněm přesnosti. Alternativně RSL program může být posprocesem převeden na nativní robotický jazyk.
Standardní systém Visual Components poskytuje celou řadu různých kinematických chování pro simulaci široké škály typů robotů: kloubových, kartézských, delta, paralelogramů a SCARA. Kromě standardní kinematiky, poskytované systémem, můžete vytvářet vlastní algoritmy v Python.
Klíčové výhody používání Visual Components k simulaci robotických systému jsou:
- vývoj pracovišť off-line,
- snížení dodacích lhůt robotických pracovišť,
- eliminace nákladných změn dispozičního uspořádání na poslední chvíli,
- snižení rizik prostřednictvím animace a simulace,
- potvrzení doby cyklu robotického pracoviště.